-
ELEKTROMOTORY
- Asynchronní motory
-
Stejnosměrné motory
- DC motory
-
BLDC motory
-
DUNKERMOTOREN BG
- BGA 22 dCore
- BGA 22 dGo
- BGA 32 dCore
- BG 32 KI
- BG 42 dCore
- BG 42 KI
- BG 45
- BG 45 SI
- BG 45 PI/MI
- BG 45 CI/PB/EC
- BG 45 SMD
- BG 62 dCore
- BG 65 dCore
- BG 65
- BG 65 SI
- BG 65 PI/MI
- BG 65S
- BG 66 dPro CO/IO
- BG 65S SI
- BG 65S SMD
- BG 65 CI/PB/EC
- BG 66 dPro PN/EC/EI
- BG 65S CI/PB/EC
- BG 65 dMove
- BG 65S PI/MI
- BG 66 dMove
- BG 75
- BG 75 SMD
- BG 75 SI
- BG 75 dPro CO/IO
- BG 75 PI/MI
- BG 75 dPro PN/EC/EI
- BG 75 CI/PB/EC
- BG 95 dCore
- BG 95 dPro CO/IO
- BG 95 SMD
- TRANSTECNO BL/BLS
- FASTECH Ezi-SPEED
-
DUNKERMOTOREN BG
- Příslušenství
- Servomotory
-
Krokové motory
- Bez zpětné vazby
-
Se zpětnou vazbou
-
Ezi-SERVO
- EZI-SERVO ST
- EZI-SERVO MINI
- EZI-SERVO PLUS-R
- EZI-SERVO PLUS-R MINI
- EZI-SERVO II BT
- EZI-SERVO ALL
- Ezi-SERVO II EtherCAT
- Ezi-SERVO II EtherCAT TO
- Ezi-SERVO II EtherCAT MINI
- Ezi-SERVO II EtherCAT 4X
- Ezi-SERVO II EtherCAT ALL
- Ezi-SERVO II Plus-E
- Ezi-SERVO II Plus-E MINI
- Ezi-SERVO II Plus-E ALL
- Ezi-SERVO II CC-Link
- Ezi-SERVO HS
- S-SERVO
-
Ezi-SERVO
- Příslušenství
- Lineární motory
- Momentové motory
- Trakční motory
-
Vřetenové motory
-
Vřetena s manuální výměnou nástroje
- MULTITECH XS
- MULTITECH S
- MULTITECH MA
-
MULTITECH ML
- ML-1C 7,5-12 24 ER 32DX
- ML-1C 7.5/12 24 ER 40
- ML-1C 7.5/12 24 ER32 DX-SX
- ML-1C 7.5/12 24 2ER 40DX
- ML-1C 7.5/12 24 ER32 CROSS 2+2 ENDS
- ML-1C 10/12 24 ER 32DX
- ML-1C 10/12 24 ER 40DX
- ML-1C 10/12 24 ER 32 DX-SX
- ML-1C 10/12 24 ER40 DX-SX
- ML-1C 10/12 24 ER32 CROSS 2+2 ENDS
- ML-2 9.5/12 24 ER 40DX
- ML-2 9.5/12 24 ER40 DX-SX
- ML-2 12/12 24 ER 40DX
- ML-2 12/12 24 ER40 DX-SX
- ML-2 12/12 24 ER40 CROSS 2+2 ENDS
- MULTITECH QN
- MULTITECH MQH
- Vřetena s automatickou výměnou nástroje
- Obráběcí hlavy
-
Příslušenství
- Držák nástroje HSK63F-ER32
- Držák nástroje HSK63A-ER32
- Držák nástroje ISO30-ER32
- Odkládací držák nástroje HSK63F
- Odkládací držák nástroje HSK63A
- Odkládací držák nástroje ISO30
- C-OSA
- iM smart senzor
- Výměník tepla pro elektrovřetena HITECO
- Agregované jednotky
- Výměníky nástrojů
-
Vřetena s manuální výměnou nástroje
- PŘEVODOVKY
-
LINEÁRNÍ TECHNIKA
- Lineární vedení
- Polohovací jednotky
- Aktuátory
- Zdvižné převodovky
- Ozubené hřebeny a pastorky
- Spojky
-
ŘÍZENÍ
- Frekvenční měniče
- Servo řízení
- Řízení stejnosměrných motorů
- Řízení krokových motorů
- Řízení kompaktních motorů
- Řízení trakčních motorů
-
Řízení aktuátorů
- Řídicí jednotky
-
Ruční ovladače
- TDH1
- TDH2
- TDH3
- TDH4
- TDH5
- TDH5C
- TDH5PR
- TDH6
- TDH6PR
- TDH8
- TDH8D
- TDH8P
- TDH9P
- TDH11P
- TDH12P
- TDH13P
- TDH15
- TDH16
- TDH17
- TDH18P
- TDH19P
- TDH20P
- TDH24P
- TDH27P
- TDH29
- TFH1
- TFH2
- TFH3
- TFH4
- TFH5
- TFH6
- TFH7
- TFH7P
- TFH7S
- TFH8
- TFH11
- TFH13
- TFH15
- TFH16
- TFH17
- TFH21
- TFH22
- TFH25
- TFH27
- TFH28
- TFH32
- TFH33
- TFH34
- TFH35
- TFS
- TFS2
- TFS3
- TFS5
- TFS6
- TFS7
- TFS8
- TFS9
- TH1
- TH2
- TH3
- TH4
- TH5
- TH6
- TH7
- TH7R
- TH8
- TH9
- TH10
- TH11
- TH12
- TH13
- TH14
- TH15
- TH16
- TH17
- TH19
- TH21
- TH23
- TH24
- TH25
- TH26
- TH30
- TH37
- TMH1
- TMH3
- TMH5
- TMH7
- TMH9
- TMH11
- TMH12
- TMH13
- TMH15
- TMH16
- TMH17
- TMH18
- TMH19
- TMH21
- TMH26
- TMH29
- TNP1
- TNP2
- TNP3
- TNP4
- TNP5
- TNP6
- TNP7
- TNP8
- TNP10
- Napájecí zdroje
- Příslušenství
- Komunikační brány
- Digitální I/O
- Analogové I/O
Ezi-SERVO II EtherCAT 4X
- přídržný moment: 0,016~2,4 N.m
- rozlišení enkodéru: 4000 / 10000 / 16000 / 20000 pulzů/ot.
- Přípustná okolní teplota: 0°C~+55°C
- napájecí napětí: 24 VDC
Velikosti:

- Systém Ezi-SERVO II EtherCAT 4X tvoří hybridní krokový motor se zpětnou vazbou a externí řídicí jednotka, jenž disponuje inteligentním řízením a průmyslovou sběrnicí EtherCAT.
- Řídicí jednotka s EtherCAT sběrnicí se chová jako slave modul s podporou aplikační vrstvy protokolu CANopen a implementací EtherCAT (CoE – CANopen over EtherCAT) podle profilu zařízení pro elektrické pohony CiA402.
-
Krokové motory jsou osazeny inkrementálním optickým snímačem s vysokým rozlišením až 20 000 pulzů na 1 otáčku, který zaručí velmi přesné polohování bez ztráty kroku.
-
Rozhraní EtherCAT poskytuje vysokou komunikační rychlost 100 Mbit/s v plně duplexním provozu. Díky tomu má systém minimální prodlení a přesnou synchronizaci vzájemně propojených pohonů.
-
Řídicí jednotka má pokročilé funkce polohování a řízení rychlostí včetně možnosti referování na snímač či mechanickou překážku (Homing mód).
-
Systém Ezi-SERVO II EtherCAT 4X podporuje tyto poziční módy: řízení polohy profilu (Profile Position Mode – PP), řízení homingu (Homing Mode – HM) a řízení cyklické synchronní polohy (Cyclic Synchronous Position Mode – CSP)
-
Řídicí jednotka disponuje 3 vyhrazenými vstupy pro 2 limitní snímače (LIMIT+/LIMIT-) + 1 referenční snímač (ORIGIN) a 3 programovatelnými vstupy (In1~In3). Výstupní obvod disponuje 2 programovatelnými výstupy (Out1~Out2).
-
Plynulý rotační pohyb je dosažen už od 0,2 ot/min.
-
Možnost navýšení proudu motoru až na 150 % jmenovité hodnoty nastavením parametru běhového proudu (objekt 2007h – Run Current).
-
Možnost krátkodobého navýšení proudu motoru při rozběhu až na 350 % jmenovité hodnoty proudu (objekt 2008h – Boost Current).
-
Možnost vzájemného sesíťování až 65 535 dalších jednotek (os) s jedinečnou IP adresou u každé řídicí jednotky.
-
Schopnost detekce poruchových stavů.
- Krokové motory vel. NEMA 17~24 mohou být doplněny o elektromagnetickou brzdu -BK.
- Ke krokovým motorům ze sestavy Ezi-SERVO II nabízíme přímé nebo úhlové planetové převodovky APEX Dynamics.
Klíčové vlastnosti:
- Externí zapouzdřený kontrolér s integrovanou sběrnicí EtherCAT
-
Možno ovládat po sběrnici EtherCAT podle profilu zařízení CiA402
-
Zpětnovazební systém s uzavřenou smyčkou a vysokým rozlišením
-
Stabilní systém bez oscilací
-
Rychlá odezva
-
Redukce tepla a úspora energie
-
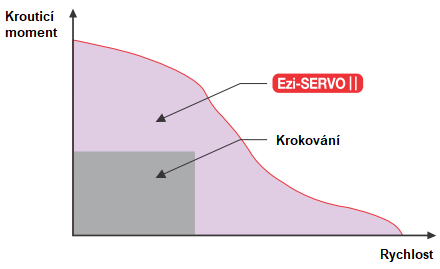
Vylepšený průběh krouticího momentu v celém spektru otáček

Žádné vibrace a oscilace

Hladké a přesné polohování

Rychlá odezva
Vysoké rozlišení
Krokový motor systému Ezi-SERVO II EtherCat 4X je osazen vysoce přesným inkrementálním enkodérem s rozlišením až 20 000 pulzů na otáčku s možností 12 úrovní softwarového přenastavení.

Vysoký krouticí moment
Ve srovnání s běžnými krokovými motory a drivery dokáže systém Ezi-SERVO II EtherCat 4X udržovat vysoký krouticí moment v poměrně velkém spektru otáček. To znamená, že Ezi-SERVO II EtherCat 4X nepřetržitě pracuje bez ztráty pozice při 100% zatížení. Na rozdíl od konvenčních driverů s mikrokrokováním využívá Ezi-SERVO II EtherCat 4X vysoký kontinuální krouticí moment ve vyšších rychlostech pohybu díky inovativnímu a optimálnímu řízení proudu fáze.
Vysoká rychlost
Pro tento produkt není konfigurátor k dispozici.
3D modely k vyžádání na info@raveo.cz